
I.技术原理
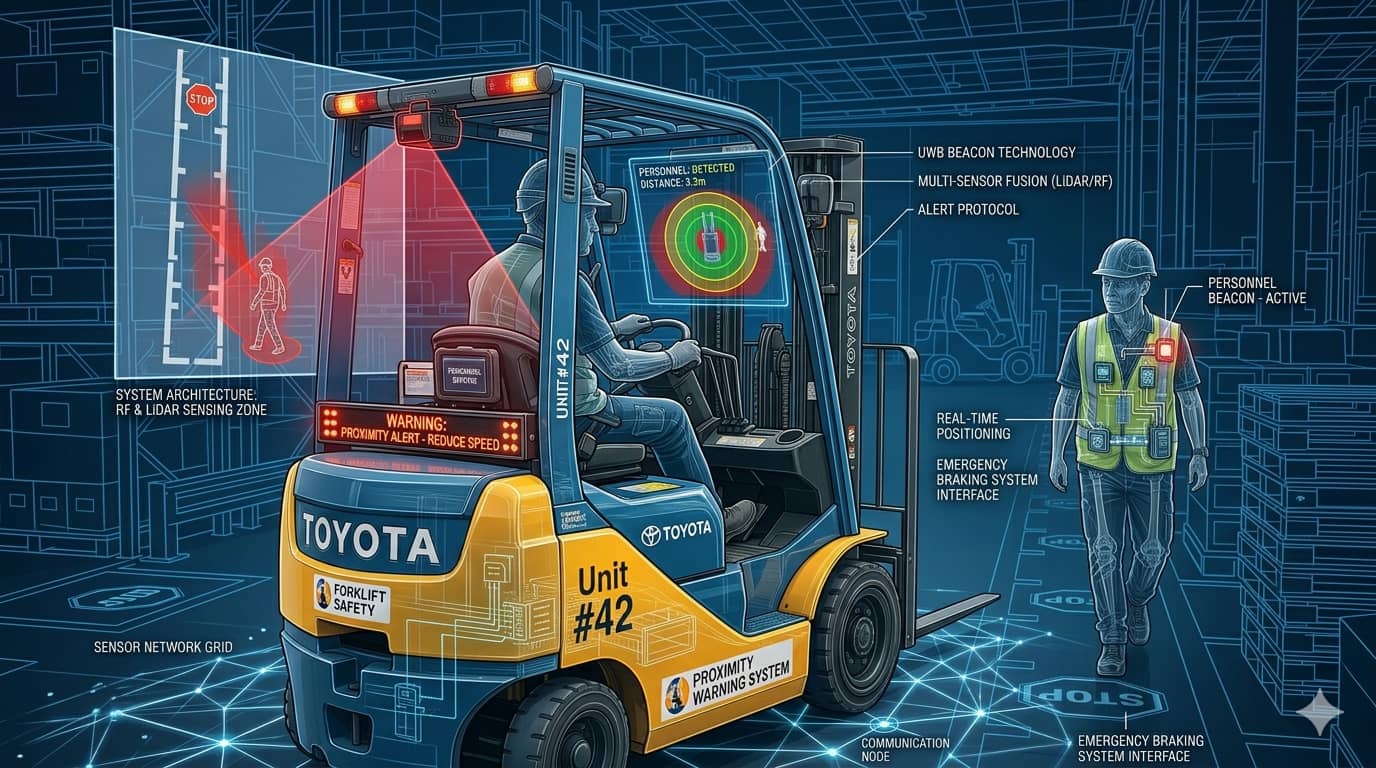
近距离警告提示系统(PWAS)采用多传感器融合技术,在车辆周围建立一个虚拟安全保护区(也称为虚拟电子围栏),可实时监控行人、物体和其他车辆的接近情况。当检测到潜在碰撞风险时,系统会立即向车辆操作员和附近人员发出多级警告信号。必要时,系统还可以启动车辆控制系统,启动紧急制动。
II. 系统组成
根据实际操作条件和叉车能见度的特殊性--前方视野相对较好,而后方视野需要主要保护--该解决方案采用毫米波雷达和人工智能视觉识别相结合的方式。通过将基于雷达的警告与人工智能驱动的人工检测和监控相结合,它为叉车提供了全面的安全保护,大大降低了工业环境中发生碰撞事故的风险,提高了操作安全性和效率。
III.主要组件清单
| 序号 | 组件名称 | 数量 | 技术参数 | 功能说明 |
| 1 | 中央控制单元 (CCU) 和显示终端 | 1 套 | 工业 ARM 处理器、7 英寸触摸屏、阳光下可视、IP65 防护等级 | 核心系统数据处理、系统状态显示和参数配置 |
| 3 | 毫米波雷达传感器 | 3 个 | 77 千兆赫,探测范围 0.1-30 米,120° 水平视场角 | 全天候障碍物探测 |
| 4 | 人工智能视觉相机 | 1 个 | 500 万像素,1080P@30fps,带红外夜视功能 | 人形识别和行为分析 |
| 5 | 车载警报装置 | 1 套 | 110 分贝蜂鸣器、高亮度 LED 警报灯(红/黄/绿三种颜色) | 多级声光报警 |
IV.网络和通信组件
工业级 CAN 总线:将各种传感器连接到控制单元。
4G/5G 通信模块:1 个(可选),用于远程监控和数据上传。
Wi-Fi 或蓝牙模块:1 个(可选),用于现场配置和数据下载。
V.安装位置和平面图
详细的安装位置说明
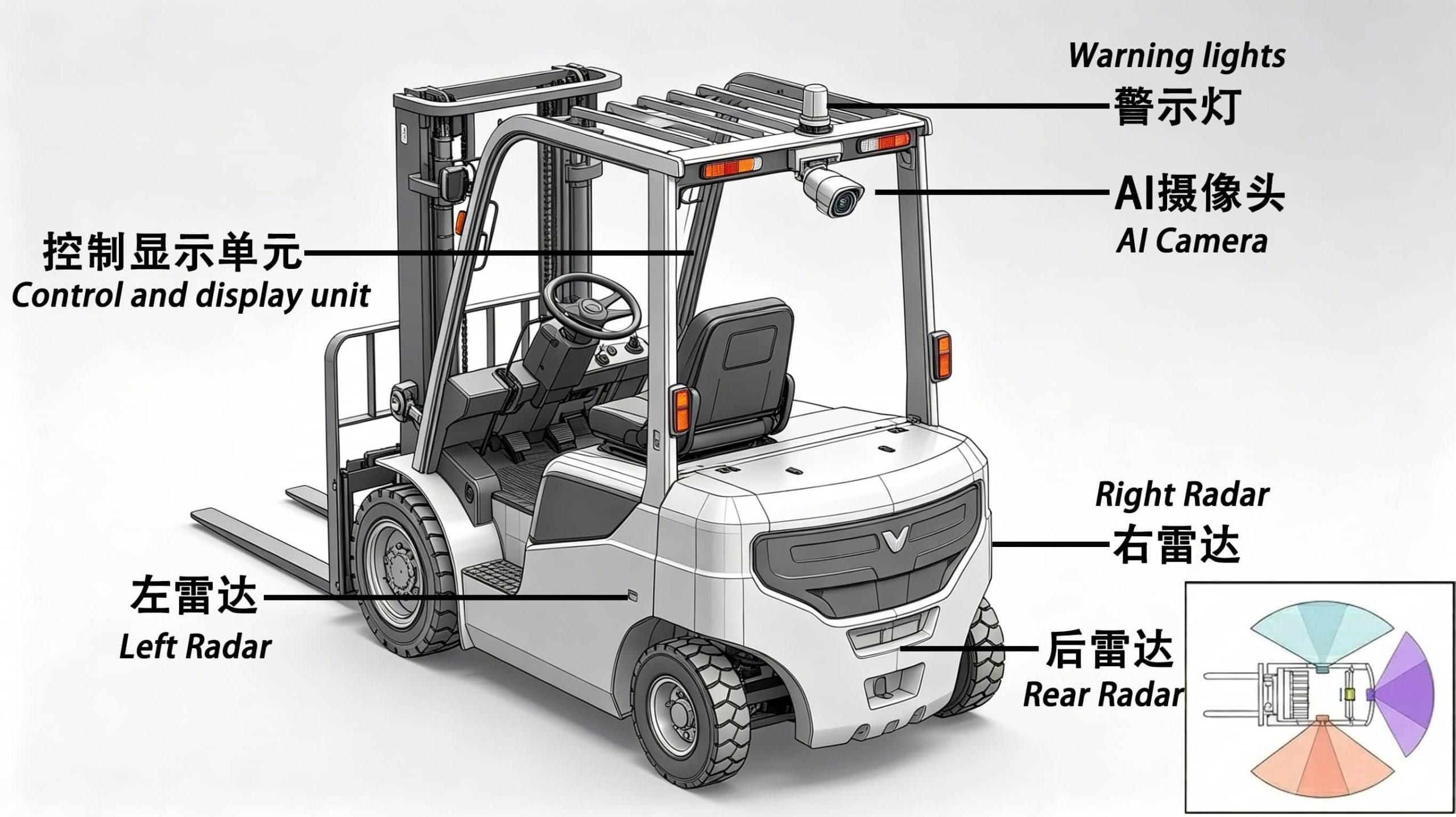
1.传感器安装
侧面区域:
左侧毫米波雷达: 安装在左后轮上方,覆盖左后方区域。
右侧毫米波雷达: 安装在右后轮上方,覆盖右后部区域。
落后地区:
后置毫米波雷达: 安装在叉车尾部中央位置,覆盖倒车区域。
后置人工智能摄像头 安装在驾驶室顶棚后部,覆盖倒车区域。
2.安装核心设备
中央控制和显示终端: 安装在驾驶员仪表板右侧,便于操作员观察。
电源管理模块: 直接连接叉车蓄电池,并配有专用保险丝。
3.安装警告装置
视听警报: 与显示终端集成。
声光警示灯: 驾驶室顶部安装了 360° 旋转警示灯,有红、黄、绿三种颜色区域。
安装技术要求
1.电气连接
电源要求: 系统总功率 ≤ 150W;建议使用单独的 20A 保险丝。
电缆规格 传感器电缆使用屏蔽双绞线(CAT6A),电源电缆≥2.5mm²。
防水: 所有外部连接器均采用 IP68 级防水连接器,电缆入口处密封防水。
2.机械安装
安装方法: 雷达采用嵌入式安装方式,而人工智能摄像机则安装在配有减震垫圈的不锈钢支架上。
安装角度: 雷达传感器安装误差 ≤ ±1°,摄像头安装误差 ≤ ±0.5°。
保护措施: 在所有外部设备上安装保护罩,以防止碰撞和灰尘进入。
VI.工作流程
区域设置: 在车辆周围建立多层保护区(警告区、警戒区、危险区)。
毫米波雷达探测 监控左侧、右侧和后方的障碍物。
人工智能视觉识别: 广角高清摄像头采用人工智能动态识别技术,可识别和分析从后方以及左右后方接近的物体或人员。
风险评估: 通过整合雷达和摄像头数据并利用内置算法,该系统可以计算接近物体的类型、速度、距离和轨迹,评估发生碰撞的可能性,并对危险行为发出预警。
警告 屏幕闪烁亮光,蜂鸣器响起,提醒驾驶员及时采取保护措施。视听警报灯会根据警报级别发出声音和视觉警报,提醒其他车辆或行人注意。
分层警报灯:
无警告(例如,>8 米):LED 灯保持绿色。
1 级警报(如 5-8 米):视觉指示(黄色 LED 灯闪烁)。
2 级警报(如 3-5 米):声音警报(间歇警告音)+ 视觉指示(红色和黄色 LED 灯闪烁)。3 级警报(例如,<3 米):响亮的声音警报(快速警告音)+ 视觉指示(红色 LED 快速闪烁);可选择与叉车控制系统集成(如自动减速)。
数据记录 记录所有警报事件,以便进行安全分析和改进培训。
数据上传: 如果配置了通信模块,数据可实时上传到系统中,实现远程监控。
Ⅶ.技术参数

检测范围 180° 全方位向后,最远可达 30 米。
定位精度: 人员/车辆定位精度 ±10 厘米。
响应时间: <100 毫秒(从检测到警报)。
误报率: <1%(在标准工业环境中)
漏检率: <0.1%(在指定保护区域内)
Ⅷ.系统升级
软件升级: 支持远程 OTA 升级并增强了检测算法。
硬件扩展: 预留接口支持增加传感器数量。
功能扩展: 支持与工厂的 MES 系统集成,实现安全管理的数字化。







