
1. Aperçu
Le camion de minerai souterrain système de pesage Ce système est essentiel pour la surveillance en temps réel du volume de chargement et l'amélioration de l'efficacité et de la sécurité du transport dans les opérations minières. Basée sur la technologie de pesage par jauges de contrainte, cette solution utilise trois capteurs de poids installés sur la poutre du camion à minerai. Associé à un système de pesage hôte et à une communication par bus CAN, ce système permet la collecte, le calcul et la transmission précis des données de poids. Adapté aux environnements difficiles des mines souterraines, ce système permet l'affichage des données en temps réel et un contrôle intégré, contribuant ainsi au développement de mines intelligentes.
2.Principe du système
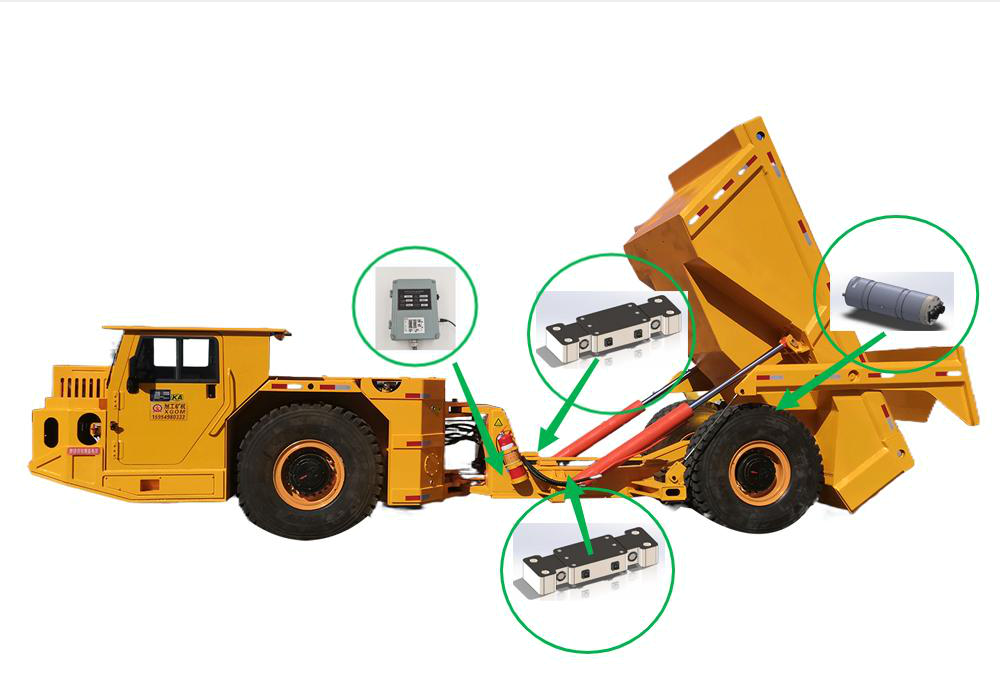
Couche de détection : Trois cellules de charge à jauge de contrainte sont installées aux points de contrainte clés de la poutre du camion à minerai, détectant la déformation de la poutre en temps réel et la convertissant en signaux électriques.
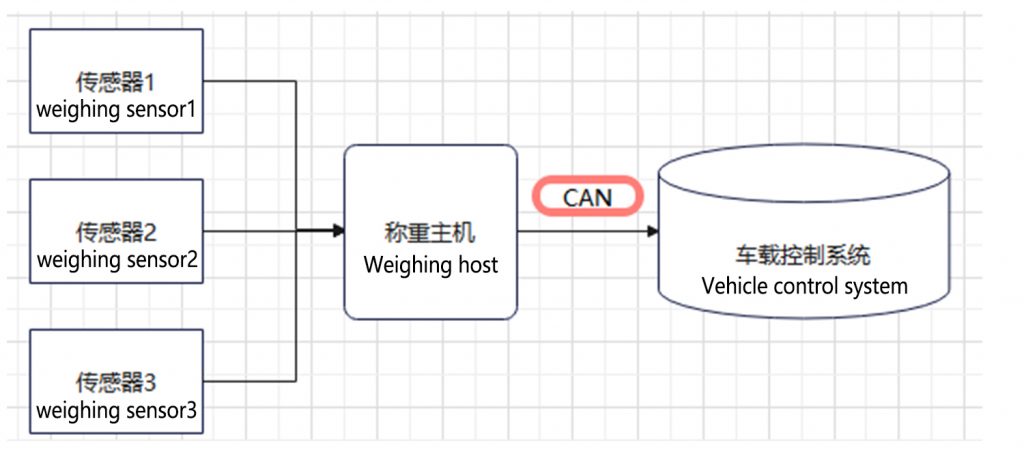
Couche de traitement : L'hôte de pesage reçoit les signaux du capteur et calcule le poids net à l'aide d'algorithmes dynamiques (tels que le filtrage et la compensation de température), éliminant ainsi les interférences dues au mouvement du véhicule.
Couche de transmission : Les données de poids traitées sont transmises au système de contrôle du camion à minerai via le bus CAN (protocole CAN-OPEN), permettant un affichage et un contrôle intégrés.
3. Composition du système
| Composants | Spécifications/Modèle | Quantité | Remarques |
| Capteur de pesée | SZ-DB30T-30MC (capacité de 30 tonnes) | 3 | Type de puce, protection IP68, adapté au montage sur poutre |
| Pesée de l'hôte | Série SZ-E02 | 1 | Alimentation 12-24 V CC, prend en charge le protocole CAN-OPEN |
| Câble | Câble blindé spécialisé | Sur demande | Résistant à l'abrasion et à la corrosion |
| Interface de bus CAN | Norme CAN 2.0B | – | Intégré à l'hôte, débit de transmission de 250 kbps |
4. Emplacement d'installation du capteur
Point d'installation
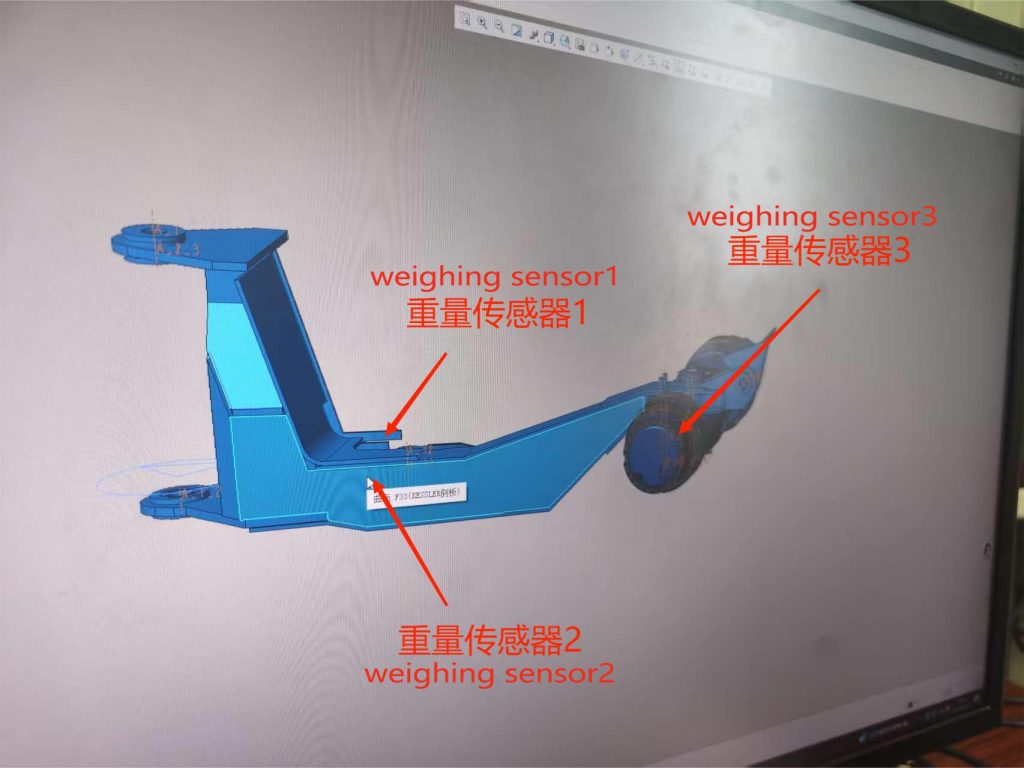
Emplacement du cadre avant (2 capteurs) :
- Emplacement : Sur les ailes gauche et droite ou sur les ailes du châssis au-dessus de l’essieu avant, à environ 1/4 de la longueur du véhicule à partir du point de support de l’essieu avant.
- Raison : La partie avant porte la charge initiale, évitant ainsi toute interférence avec le mécanisme de direction et assurant la stabilité.
- Méthode de montage : Fixez la base du capteur au cadre à l’aide de boulons à haute résistance, garantissant un ajustement serré.
Axe arrière (1 capteur) :
- Emplacement : À l’arrière du véhicule, là où l’habitacle se connecte au châssis.
- Raison : La zone portante principale reflète efficacement la répartition globale de la charge.
- Méthode de montage : Le capteur remplace directement l’essieu porteur.
Notes d'installation
- Préparation de la surface : Le point de montage doit être poli et lisse pour garantir qu'il n'y a pas d'espace entre le capteur et le faisceau.
- Conception anti-erreur : les capteurs gauche et droit sont installés symétriquement pour compenser les erreurs de charge excentrique.
- Protection de l'environnement : Un cache-poussière est installé pour éviter les impacts avec les rochers et l'érosion par l'eau boueuse.
5. Paramètres techniques
- Charge nominale : 90 tonnes (compatible avec les véhicules de 40 à 80 tonnes)
- Précision de pesée : ≤±2 % F.S. (statique)
- Température de fonctionnement : -30°C à +70°C
- Protocole de communication : CAN-OPEN (personnalisable avec J1939)
- Niveau de protection : IP68 pour le capteur, IP66 pour l'hôte
- Alimentation requise : 24 V CC (compatible avec les véhicules)
6. Intégration et communication
- Flux de données : Capteur → Hôte de balance → Bus CAN → Système de contrôle du véhicule (par exemple, tableau de bord ou API).
- Extension des fonctions : prend en charge les alarmes de surcharge, les statistiques de charge et la surveillance à distance (via les systèmes de gestion de flotte).
7. Avantage de faisabilité
- Optimisation des ressources : seuls trois capteurs sont nécessaires, ce qui réduit les coûts et la complexité de l'installation.
- Temps réel : le bus CAN assure une transmission de données à faible latence, adaptée aux opérations dynamiques.
- Fiabilité : Basé sur une solution éprouvée (en référence au cas des véhicules tout-terrain à carrosserie large), il est adapté aux environnements souterrains.







